Time-Accurate Rotor with Thrust-Convergence Stopping Criterion#
This notebook demonstrates how to configure a run control stopping criterion for a time-accurate rotor simulation. The criterion monitors the mean thrust (CFz) averaged over the last two rotor revolutions and halts the simulation automatically once the mean has converged - avoiding manual step-count tuning.
The geometry is the DTU 10MW reference wind turbine (blade radius R ≈ 89 m). The setup uses a time-accurate sliding-interface approach, so the physical time step size and maximum number of revolutions are derived from the single parameter dt_deg.
Key features covered:
Project creation from a local CAD geometry file (beta mesher)
Time-accurate unsteady simulation with a sliding rotating zone
ForceOutputwithMovingStatisticcomputing a rolling mean over the last two revolutionsRunControlwith aStoppingCriteriontied to the rolling-mean thrust output
Note: The settings in this example are by no means a validation setup; they are crafted to showcase the capabilities of Flow360 and we have intentionally reduced node count and example FC cost. For rigorous validation, modify the settings as needed.
1. Load a Project#
Load the Flow360 client and create a new project from the DTU 10MW EGADS geometry file (length unit: metres).
[1]:
import numpy as np
import matplotlib.pyplot as plt
import flow360 as fl
from flow360.examples import DTU_WindTurbine
DTU_WindTurbine.get_files()
project = fl.Project.from_geometry(
DTU_WindTurbine.geometry, length_unit="m", name="DTU Wind Turbine stopping-criterion tutorial"
)
geometry = project.geometry
[09:58:38] INFO: Geometry successfully submitted: type = Geometry name = DTU Wind Turbine stopping-criterion tutorial id = geo-f3c47111-91b5-44c0-afd5-a7c3d811fb73 status = uploaded project id = prj-efdd1dbc-c9e4-4d01-895a-cc034e4caae6
INFO: Waiting for geometry to be processed.
2. Geometry Primitives#
Define:
rotor_cylinder— the rotating zone encapsulating the rotor blades. This cylinder drives both the sliding-interface mesh zone and the rotation model.wake_cylinder— a coarser volumetric refinement zone to improve wake resolution.
[2]:
with fl.SI_unit_system:
farfield = fl.AutomatedFarfield()
R = 89.166 # blade radius [m] — DTU 10MW reference turbine
# Rotating zone: encloses the full rotor disk with margin.
# Axis along +Z (shaft direction); adjust if your geometry differs.
rotor_cylinder = fl.Cylinder(
center=(0, 0, 0),
outer_radius=110 * fl.u.m,
height=40 * fl.u.m,
axis=(0, 0, 1),
name="RotorCylinder",
)
# Wake refinement zone: extends downstream of the rotor.
wake_cylinder = fl.Cylinder(
center=(0, 0, 55) * fl.u.m,
outer_radius=200 * fl.u.m,
height=200 * fl.u.m,
axis=(0, 0, 1),
name="WakeCylinder",
)
[10:00:03] INFO: using: SI unit system for unit inference.
3. Meshing Parameters#
The mesh is intentionally coarse — this example focuses on the stopping-criterion workflow, not on high-fidelity aerodynamics. The rotating zone interface controls the mesh density inside rotor_cylinder, and a light wake refinement is applied downstream.
[3]:
rotating_zone = fl.RotationVolume(
name="RotatingZone",
spacing_axial=2 * fl.u.m,
spacing_circumferential=2 * fl.u.m,
spacing_radial=2 * fl.u.m,
entities=rotor_cylinder,
enclosed_entities=geometry["*"],
)
meshing = fl.MeshingParams(
defaults=fl.MeshingDefaults(
surface_max_edge_length=2 * fl.u.m,
boundary_layer_first_layer_thickness=1e-4 * fl.u.m,
),
volume_zones=[farfield, rotating_zone],
refinements=[
fl.UniformRefinement(entities=wake_cylinder, spacing=4 * fl.u.m),
fl.UniformRefinement(entities=rotor_cylinder, spacing=2 * fl.u.m),
],
)
4. Time Stepping#
For a time-accurate sliding-interface simulation the time stepping must be fl.Unsteady. Using fl.Rotation with an unsteady solver activates the sliding-mesh algorithm automatically instead of MRF.
The physical time step size is derived from dt_deg and omega so that all downstream quantities (steps_per_rev, window_steps, tolerance_window_size) update consistently when either parameter is changed. The run is capped at revs revolutions; the stopping criterion (Section 6) will terminate it earlier once thrust has converged.
[4]:
omega = 8.836 * fl.u.rpm # rated angular velocity — DTU 10MW
dt_deg = 6.0 # physical time step [degrees]; change as needed
revs = 50 # maximum number of revolutions to simulate
steps_per_rev = int(360 / dt_deg)
step_size = (dt_deg * fl.u.deg / omega.to("deg/s")).to("s")
time_stepping = fl.Unsteady(
steps=revs * steps_per_rev,
step_size=step_size,
max_pseudo_steps=50,
)
rotation = fl.Rotation(
name="RotatingZone",
volumes=rotor_cylinder,
spec=fl.AngularVelocity(omega),
)
5. Force Output with Moving Statistic#
A ForceOutput is configured with a MovingStatistic that computes the rolling mean of CFz over the last two rotor revolutions (revs_for_mean × steps_per_rev physical steps). This smoothed thrust signal filters out blade-passage harmonics and is used as the convergence monitor in the next section.
[5]:
revs_for_mean = 2
window_steps = revs_for_mean * steps_per_rev
walls = fl.Wall(surfaces=geometry["*"], use_wall_function=True)
thrust_output = fl.ForceOutput(
name="thrust_monitor",
output_fields=["CFz", "CMz"],
moving_statistic=fl.MovingStatistic(
method="mean",
moving_window_size=window_steps,
),
models=[walls],
)
6. Run Control — Thrust Convergence Stopping Criterion#
The StoppingCriterion monitors the rolling-mean CFz from thrust_output. When a tolerance_window_size is specified, the criterion evaluates the half-range |max − min| / 2 of the monitored field within the last tolerance_window_size output records. The criterion is satisfied when this half-range drops below tolerance.
tolerance_window_size = 3 × steps_per_rev(three revolutions worth of records): the oscillation amplitude of the rolling-mean CFz over the last three revolutions must drop belowtolerance.tolerance = 1e-4: absolute threshold (non-dimensional CFz).
Important — two conditions must be met (AND logic):
Satisfying the stopping criterion alone does not halt the simulation. The solver also requires that the residual convergence is met. The maximum number of physical steps overrides everything.
Note — Residual convergence: steady vs. unsteady
Steady state: only pseudo-steps are run (effectively one infinite physical step). The simulation ends when the residual drops below the absolute tolerance and all user-defined stopping criteria are satisfied.
Unsteady: at each physical step, up to
max_pseudo_stepspseudo-steps are executed. The solver advances to the next physical step either whenmax_pseudo_stepsis reached or when the residual drops below the solver tolerance — whichever comes first. The solver tolerances can be specified as:
Absolute tolerance: the residual falls below a fixed threshold.
Relative tolerance: the residual falls below a fraction of the initial residual of that physical step.
The simulation terminates when all user-defined stopping criteria are satisfied and the residual convergence within the current physical step is met.
[6]:
revs_for_stop_criterion = 3
tolerance_window_size = revs_for_stop_criterion * steps_per_rev
run_control = fl.RunControl(
stopping_criteria=[
fl.StoppingCriterion(
name="thrust_convergence",
monitor_output=thrust_output,
monitor_field="CFz",
tolerance=1e-4,
tolerance_window_size=tolerance_window_size,
)
]
)
7. Simulation Parameters#
Assemble all components into fl.SimulationParams. The operating condition is set for the DTU 10MW rated point: 11.0 m/s wind speed (Mach ≈ 0.032) along the rotor axis. The reference velocity is set to the blade-tip speed (omega × R ≈ 83 m/s, Mach ≈ 0.24) for non-dimensionalisation.
[7]:
with fl.SI_unit_system:
params = fl.SimulationParams(
meshing=meshing,
operating_condition=fl.AerospaceCondition(
velocity_magnitude=11.0, # rated wind speed [m/s]
alpha=90 * fl.u.deg, # wind aligned with rotor axis (+Z)
reference_velocity_magnitude=omega.to("rad/s").to_value()*R, # ≈ tip speed [m/s] for non-dimensionalisation
),
reference_geometry=fl.ReferenceGeometry(
moment_center=(0, 0, 0),
moment_length=(R, R, R),
area=np.pi * R**2,
),
time_stepping=time_stepping,
run_control=run_control,
models=[
fl.Fluid(
navier_stokes_solver=fl.NavierStokesSolver(
absolute_tolerance=1e-10,
relative_tolerance=1e-1,
),
turbulence_model_solver=fl.SpalartAllmaras(
absolute_tolerance=1e-10,
relative_tolerance=1e-1,
),
),
walls,
fl.Freestream(surfaces=farfield.farfield),
rotation,
],
outputs=[
fl.SurfaceOutput(
surfaces=geometry["*"],
output_fields=["Cp", "Cf", "CfVec"],
),
thrust_output,
],
)
[10:00:19] INFO: using: SI unit system for unit inference.
8. Run the Case#
Submit the case using the beta mesher. The solver will run up to revs × steps_per_rev physical steps but stop automatically once the thrust convergence criterion is satisfied.
[ ]:
case = project.run_case(
params=params,
name="Time-Accurate Rotor with Thrust-Convergence Stopping Criterion",
use_beta_mesher=True,
)
[10:00:30] INFO: Selecting beta/in-house mesher for possible meshing tasks.
[10:00:32] INFO: Successfully submitted: type = Case name = Rotor stopping-criterion tutorial id = case-74362a34-2da8-4103-9e44-2d107f4a882b status = pending project id = prj-efdd1dbc-c9e4-4d01-895a-cc034e4caae6
9. Post-Processing — Thrust Convergence#
After the case completes, two subplots are generated:
Thrust convergence — instantaneous CFz alongside its two-revolution rolling mean. The stopping criterion triggered when the rolling mean plateaued, visible as the flat tail in the mean curve.
Nonlinear residuals — per-physical-step residual history for all solution fields (continuity, momentum, energy, turbulence). A horizontal dashed line shows the solver relative tolerance; when residuals drop below this level within a physical step, the solver advances to the next step.
The code below will wait for the case to be finished (case.wait()) which can take a few minutes. If this fails or you want to take a different case, substitute case.wait() for case = fl.Case("your-case-ID").
[9]:
case.wait()
# Reference quantities for dimensionalization
density = case.params.operating_condition.thermal_state.density
U_ref = case.params.operating_condition.velocity_magnitude
A_ref = case.params.reference_geometry.area
q = 0.5 * float(density) * float(U_ref) ** 2 * float(A_ref)
# Thrust monitors
thrust_monitor_mean = case.results.custom_forces["thrust_monitor_moving_statistic"].as_dataframe()
thrust_monitor_mean["Thrust_mean [N]"] = thrust_monitor_mean["totalCFz_mean"]
thrust_monitor_mean_step = thrust_monitor_mean["end_index"]
thrust_monitor = case.results.custom_forces["thrust_monitor"].as_dataframe()
thrust_monitor["Thrust [N]"] = thrust_monitor["totalCFz"]
thrust_monitor_step = thrust_monitor["physical_step"]
# --- Plot ---
fig, axes = plt.subplots(2, 1, figsize=(10, 8), sharex=False)
axes[0].plot(thrust_monitor["physical_step"], thrust_monitor["Thrust [N]"],
color="steelblue", alpha=0.5, linewidth=0.8, label="Instantaneous")
axes[0].plot(thrust_monitor_mean["end_index"], thrust_monitor_mean["Thrust_mean [N]"],
color="navy", linewidth=2, label=f"{revs_for_mean}-rev rolling mean")
axes[0].set_ylabel("Thrust [N]")
axes[0].legend()
axes[0].grid(True, alpha=0.3)
axes[0].set_title("Thrust convergence")
# Residuals: include pseudo steps, show only last revolution (via x limit)
final_step = thrust_monitor["physical_step"].iloc[-1]
non_linear = case.results.nonlinear_residuals.as_dataframe()
nl = non_linear.copy()
max_ps = nl["pseudo_step"].max() + 1
nl["step_with_pseudo"] = nl["physical_step"] + nl["pseudo_step"] / max_ps
for col in ["0_cont", "1_momx", "2_momy", "3_momz", "4_energ", "5_nuHat"]:
if col in nl.columns:
axes[1].semilogy(nl["step_with_pseudo"], nl[col], label=col, alpha=0.7)
axes[1].set_xlim(final_step - steps_per_rev + 1, final_step + 1)
axes[1].set_xlabel("Physical step (with pseudo steps)")
axes[1].set_ylabel("Nonlinear residual")
axes[1].legend(fontsize=8)
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Simulation stopped at physical step {final_step} "
f"({final_step / steps_per_rev:.1f} revolutions)")
[10:40:21] INFO: Saved to /tmp/tmpmhddaw8j/8cf86ebe-6df6-4bd7-9bd5-bc741362c849.csv
[10:40:22] INFO: Saved to /tmp/tmpmhddaw8j/00a155c2-d9ff-4dc0-b2c1-836e26a8cae0.csv
[10:40:24] INFO: Saved to /tmp/tmpmhddaw8j/78a71559-9f75-4229-abf2-47c1002d63a5.csv
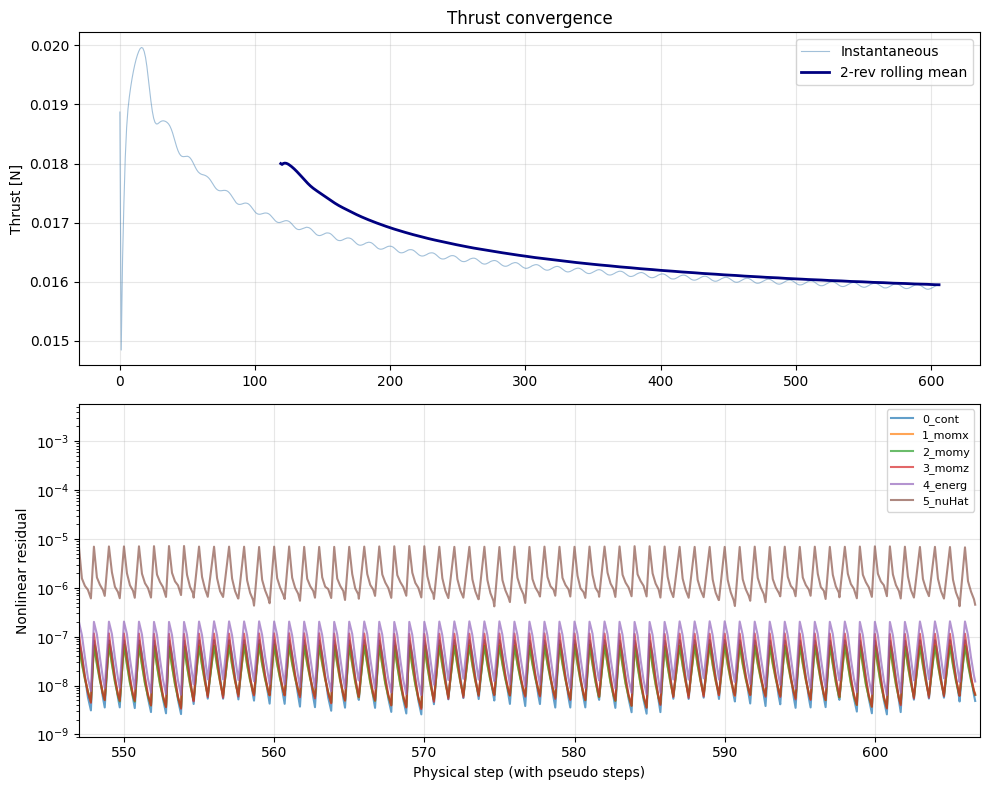
Simulation stopped at physical step 606 (10.1 revolutions)