XV-15 Rotor Blade Analysis using the Blade Element Disk Method
Contents
6.9. XV-15 Rotor Blade Analysis using the Blade Element Disk Method#
6.9.1. Highlights#
In this case study we are going to show you how to:
Simulate an XV-15 tiltrotor airplane in both hovering helicopter mode and forward flight airplane mode using the steady BET Disk solver in Flow360
Convert dimensional input quantities to nondimensional quantities in the Flow360 configuration json file
Convert nondimensional quantities in the output to dimensional quantities
6.9.2. Introduction#
The development of the XV-15 tiltrotor was launched by the NASA Ames Research Center in collaboration with Bell Helicopters in the late 1960s and early 1970s. It has become the foundation of many VTOL aircrafts today. Unlike typical helicopter rotors, tiltrotor blades demand a compromised design to operate efficiently in both helicopter and propeller modes. Hence, the blades of the XV-15 tiltrotor have high twist, high solidity and small rotor radius. In this case study, we will apply our Blade Element Theory (BET) Model based solver in Flow360 to evaluate the performance of the XV-15 rotor in both helicopter hovering mode and airplane mode.

Fig. 6.9.1 The Bell Textron XV-15 Tiltrotor aircraft prepares to land (source: United States Coast Guard)#
{kind=link}
The definition of the cross sections of the rotor blade is shown in Table 6.9.1. The main geometric characteristics of the XV-15 rotor blades are listed in Table 6.9.2.
r/R |
Airfoil |
|---|---|
0.09 |
NACA 64-935 |
0.17 |
NACA 64-528 |
0.51 |
NACA 64-118 |
0.80 |
NACA 64-(1.5)12 |
1.00 |
NACA 64-208 |
Parameter |
Value |
|---|---|
Number of blades |
3 |
Rotor radius |
150 inches |
Reference blade chord |
14 inches |
Aspect ratio |
10.71 |
Rotor solidity |
0.089 |
Linear twist angle |
-40.25 degree |
The radial chord and twist distribution is shown in Fig. 6.9.2.
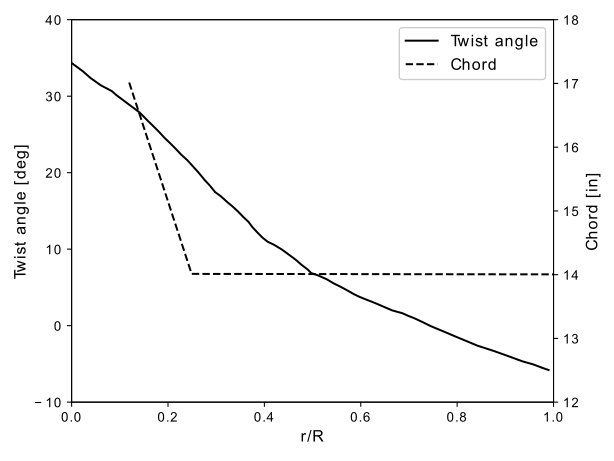
Fig. 6.9.2 XV-15 rotor blade’s twist and chord radial distribution#
More information about the geometry and a high-fidelity detached eddy simulation done using Flow360 can be found at
In this case study, the steady Navier-Stokes solver coupled with the Blade Element Theory Disk method is used to simulate the XV-15 rotor blades under two flight conditions: helicopter hovering mode and airplane mode. In order run cases in a few minutes, compared to the high fidelity unsteady simulations with full rotor geometry in the above paper, the mesh for this BET Disk example is much coarser. The mesh used in the current case study contains only 592K nodes. An overview of a slice of the mesh is shown below
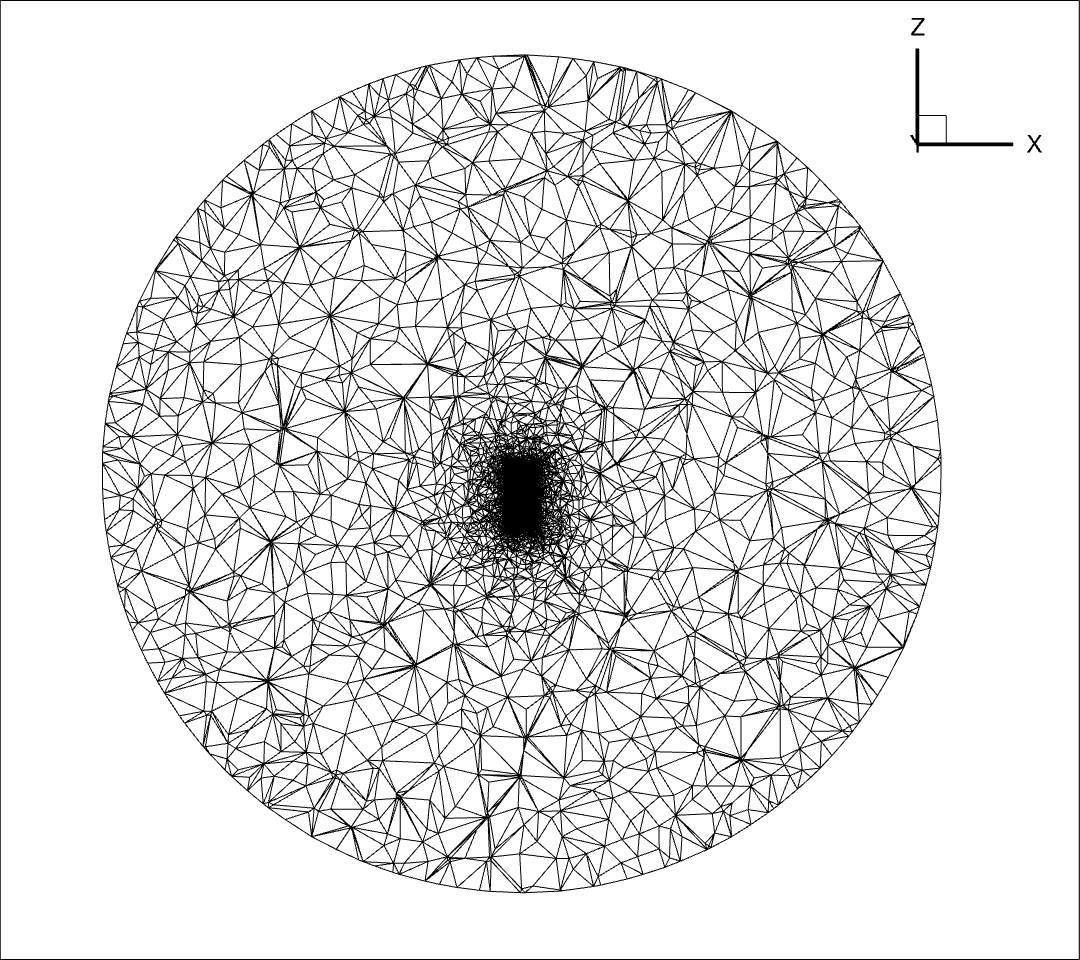
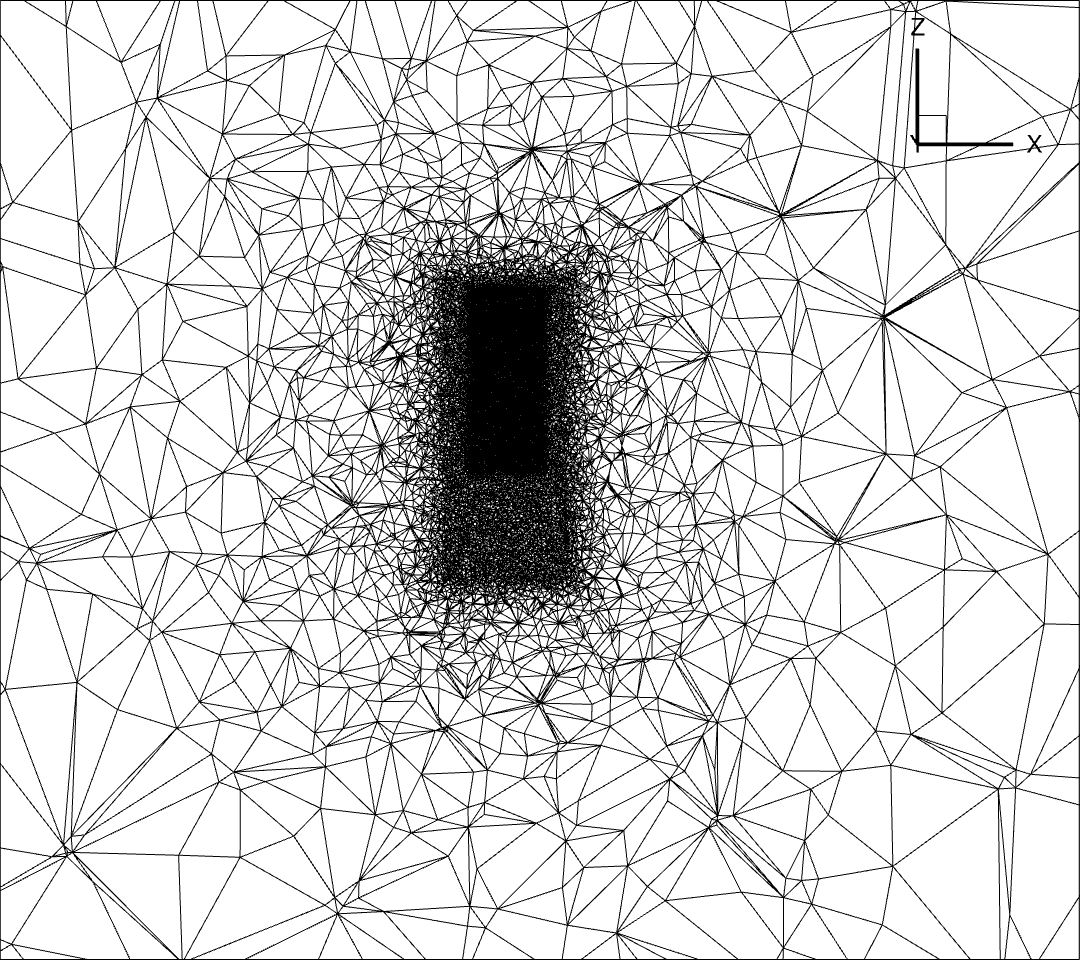
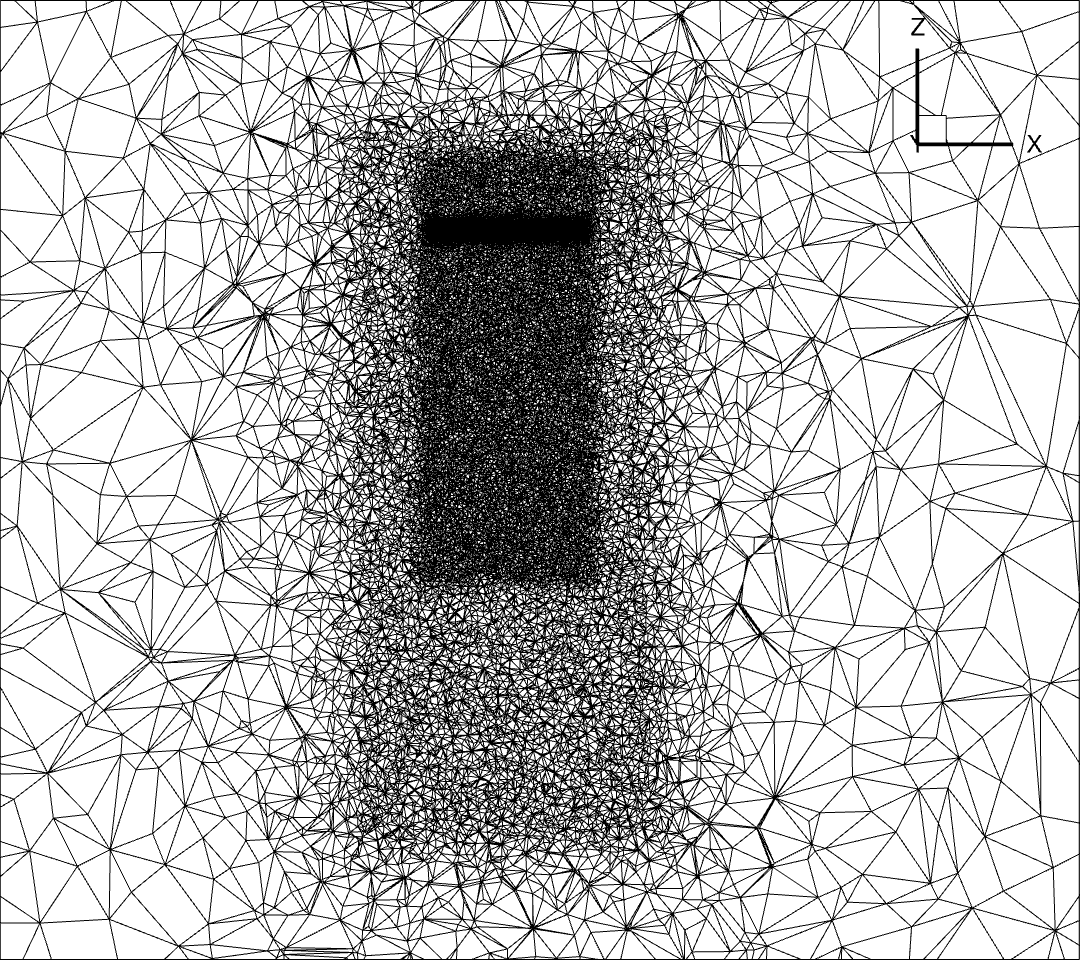
Overview of volume mesh used in BET Disk simulations of XV-15 rotor, successively zooming in from top left->top right->bottom left->bottom right.
The freestream quantities are shown below. These quantities are needed to set up the nondimensional variables in the flow360 case configuration and translate the nondimensional output variables into dimensional values. More information on nondimensionalization in Flow360 can be found at Nondimensional Inputs and Nondimensional Outputs. In the above mesh, the grid unit
air property |
sea level - |
|---|---|
density, |
|
speed of sound, |
Caution
In some simulations, the freestream is not set to be at standard sea level on purpose. For example, in the “case 1a” from 3rd AIAA CFD High Lift Prediction Workshop, the viscosity of the freestream is adjusted to analyze the full-scale geometry at wind tunnel conditions, so please set the freestream properties based on your requirements.
6.9.3. Helicopter Hovering Mode#
In helicopter hovering mode, the freestream velocity is zero. Five blade collective angles are considered in the current study:
Tip Mach Number, defined as
Reynolds Number (based on reference chord (14 inch) and blade tip speed) =
Reference Temperature = 288.15 K.
Here are some points to set up the case configuration file:
freestream->Machis set to 0, because freestream velocity is zero.freestream->MachRefhas to be a non-zero number because the above “Mach” is 0. Theoretically, this value could be arbitrary, but we set it equal to the tip Mach number (0.69) for convenience.Either
freestream->Reynoldsorfreestream->muRefshould be given to set a proper freestream viscosity. Both options are explained below:Option 1: set
freestream->Reynolds. Thefreestream->Reynoldsis based on grid unit as the reference length, thus it is mesh dependent. It’s definition is
(6.9.1)#
thus the freestream->Reynolds is calculated by:
(6.9.2)#
The freestream->Reynolds is
Option 2: set
freestream->muRef. The “muRef” here is a nondimensional quantity, it is mesh dependent because it depends on. Its definition is (6.9.3)#
If you already know the Reynolds number then you could use the following equation to get the freestream->muRef:
(6.9.4)#
Therefore, the freestream->muRef is
BETDisks->omegais the nondimensional angular speed of the rotor blades. Its definition is(6.9.5)#
Because we know
(6.9.6)#
Therefore, BETDisks->omega is 0.0046
After setting up the case configuration file, the case is ready to submit. The 592K-node mesh file, and its corresponding mesh and case configuration files can be downloaded via the following links:
Mesh file: XV15_BETDisk_R150_592K.lb8.ugrid
Mesh configuration file: Flow360Mesh.json
Case configuration file for
Case configuration file for
Case configuration file for
Case configuration file for
Case configuration file for
Note
The only difference between the configuration files of the above 5 cases is the BETDisks/twists distribution.
For detailed instructions on how to upload a mesh, run a case and download the results, please refer to the Quick Start section of this documentation - these details will not be covered in this case study.
Some tips on setting the input quantities related to BET can be found in the BETDisks section of the knowledge base. Please note that there is no hub in the high fidelity detached eddy simulation of the XV-15 rotor blades in our paper mentioned above, so to match the model used in the high fidelity simulations, the chord length in
The forces and moments related to the BET Disk are saved in the “bet_forces_v2.csv” file. A detailed description can be found at BET Loading Output. Here we will convert those non-dimensional values into dimensional values:
thrust and torque.
Because the axial direction of the rotor is in the Z axis, the thrust is saved as “Disk0_Force_z” and the torque is saved as “Disk0_Moment_z” in the .csv file. The dimensional thrust and torque can be calculated by Eq.(8.3.2) and Eq.(8.3.3):
The convergence history of the dimensional thrust and torque using steady BET Disk solver is shown in following figures:


Loading convergence of BET Disk simulation in hovering helicopter mode at various pitch angles.
sectional thrust and torque.
In the “bet_forces_v2.csv” file, the sectional thrust coefficients are provided. The process to convert the nondimensional Ct into its physical dimension, i.e. sectional thrust per unit span in SI is very similar to the one shown above. We need the dimensional quantities mentioned in Eq.(8.3.4) and Eq.(8.3.5) to compute the dimensional sectional thrust:
Radius of the rotor disk
rotating angular speed
reference chord
If we assume that we want to calculate the sectional thrust and torque at the first disk’s first blade’s second radial location, i.e. Disk0_Blade0_R1:
As a comparison example between the high fidelity full-rotor unsteady simulation and the BET Disk steady simulation, the physical sectional thrust on a blade per unit span, for the


Sectional thrust distribution and history of total thrust in hovering mode,
The biggest differences between these high fidelity simulations and these BET Disk simulations are near the tip regions where blade-vortex interactions are strong. The flow around the tip can be highly three dimensional, making a BET Disk approximation locally inaccurate. This effect is proportional to the blade disk loading, thus it is larger at hovering or near-hovering conditions when the thrust is higher then in forward flight. Even then, the total thrust of the three blades in hover, compared to the Flow360 high fidelity unsteady simulation, is ~8% different. This level of accuracy makes the BET Disk a useful tool in the preliminary design stages.
To provide another overview of the BET disk accuracy; If we look at the propeller efficiency in hovering mode, the thrust coefficient, the torque coefficient and the figure of merit defined in Eq.(6.9.10) and compare them with several experimental data and numerical prediction of high-fidelity DES simulations, we get the graphs below:
where


Comparison on thrust and torque coefficient and figure of merit in hovering mode at various pitch angles.
6.9.4. Airplane Mode#
In airplane mode, four blade collective angles are considered:
Tip Mach Number = 0.54.
Reynolds Number (based on reference chord and tip speed, with no account for the inflow velocity) =
Reference chord = 14 inch.
Reference Temperature= 288.15 K.
Advance ratio (defined as inflow speed over tip speed) = 0.337
The mesh file and mesh configuration file are the same as the files used in the helicopter hovering example above. The case configuration files, however, are different:
Case configuration file for
Case configuration file for
Case configuration file for
Case configuration file for
The convergence history of the thrust coefficients and torque coefficients using the steady BET Disk solver are shown below


Convergence history of thrust coefficient and torque coefficient in airplane mode at various pitch angles.
As an example, similarly to the helicopter hovering case shown above, the physical sectional thrust for the
Note
Please note the non-zero origin of the Y axis on the right plot of total force.


Sectional thrust distribution and thrust history in airplane mode at
To provide an overview of power efficiency in airplane mode at various pitching angles, the figure below shows the comparison of the thrust coefficient, torque coefficient and propeller propulsive efficiency, defined in Eq.(6.9.11), between the BET Disk and high fidelity simulations.


Comparison of thrust coefficient, torque coefficient and propulsive efficiency in airplane mode at various pitch angles.